Predictive maintenance¶
Status¶
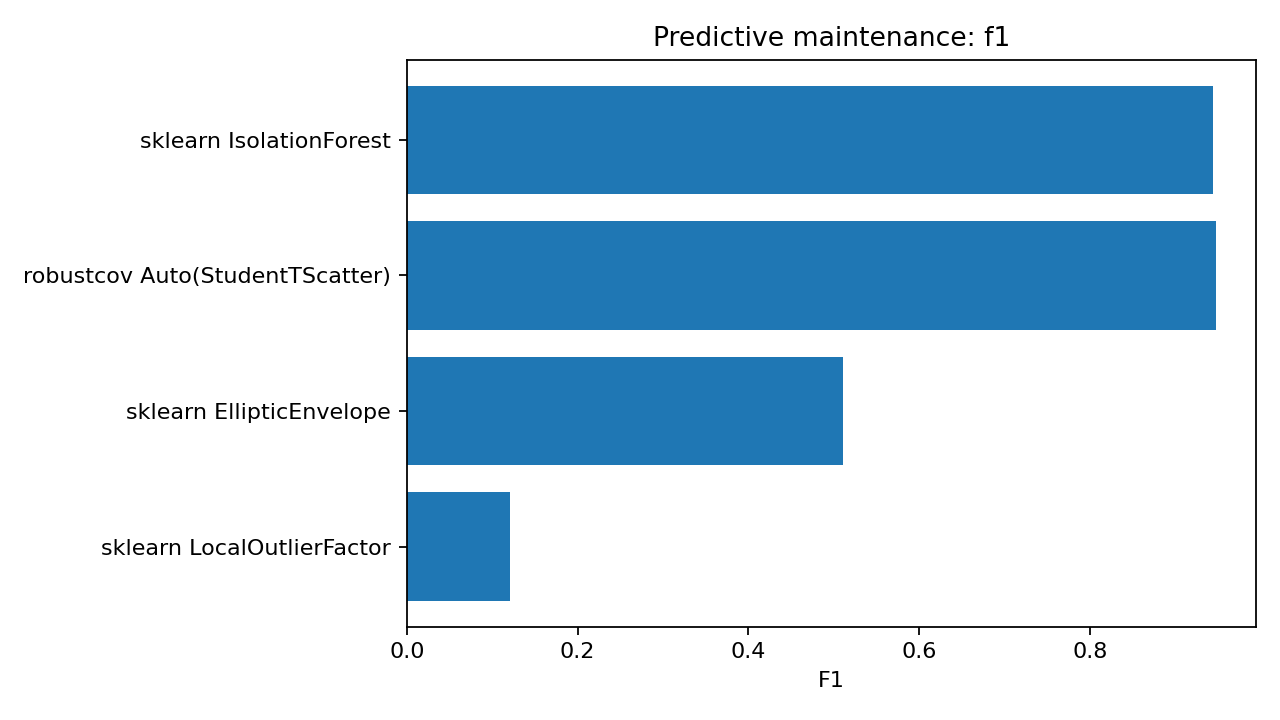
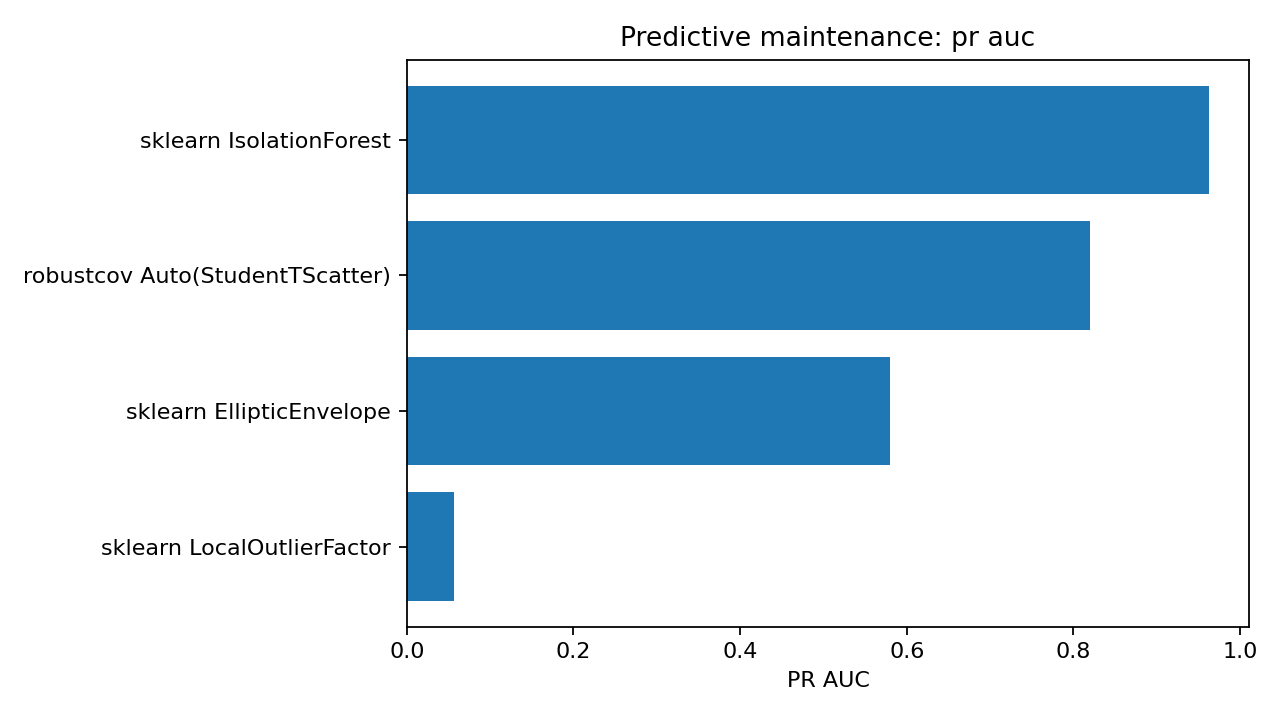
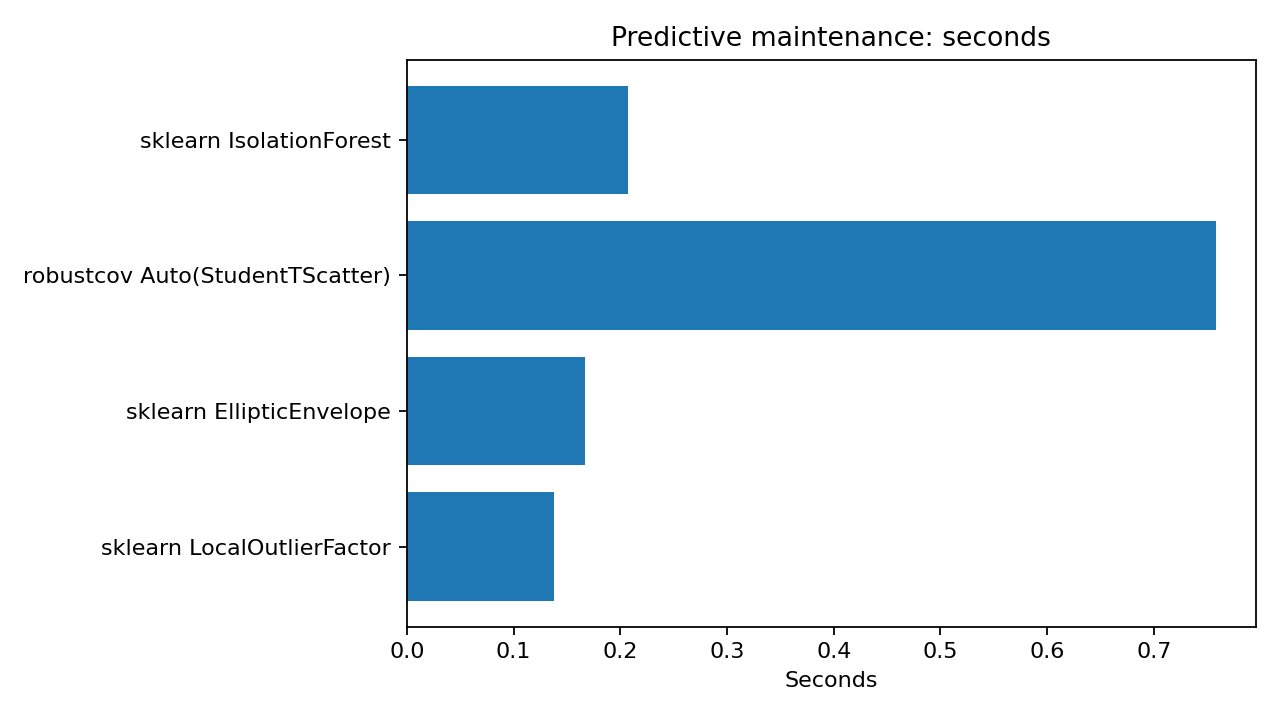
Competitive, not dominant. robustcov Auto(StudentTScatter) gives the
best F1 at the fixed detection budget, while IsolationForest has the strongest
PR-AUC and is faster. This is a good example of honest reporting: robustcov is
useful, but it is not the only strong method for this dataset.
Problem¶
Predictive-maintenance data usually contain sensor or process measurements and a binary failure indicator. The goal is to rank observations or operating states by abnormality so that likely failures are prioritized for inspection.
Result table¶
Method |
Seconds |
F1 |
ROC-AUC |
PR-AUC |
|---|---|---|---|---|
sklearn IsolationForest |
0.2076 |
0.9440 |
0.9872 |
0.9628 |
robustcov Auto(StudentTScatter) |
0.7577 |
0.9469 |
0.9846 |
0.8199 |
sklearn EllipticEnvelope |
0.1666 |
0.5103 |
0.9531 |
0.5805 |
sklearn LocalOutlierFactor |
0.1379 |
0.1209 |
0.4843 |
0.0570 |
Output from the run¶
predictive maintenance benchmark
method,seconds,precision,recall,f1,roc_auc,pr_auc,detected
sklearn IsolationForest,0.2076,0.9440,0.9440,0.9440,0.9872,0.9628,339
robustcov Auto(StudentTScatter),0.7577,0.9469,0.9469,0.9469,0.9846,0.8199,339
sklearn EllipticEnvelope,0.1666,0.5103,0.5103,0.5103,0.9531,0.5805,339
sklearn LocalOutlierFactor,0.1379,0.1209,0.1209,0.1209,0.4843,0.0570,339
saved outputs to results/external/predictive_maintenance
Plots¶
Interpretation¶
At the selected detection budget, robustcov slightly improves F1 over IsolationForest. However, IsolationForest is faster and has substantially higher PR-AUC. The most honest recommendation is therefore:
use robustcov when robust-distance interpretability or covariance-shaped sensor deviations are important;
use IsolationForest as a strong default baseline;
consider robustcov scores as additional features in a supervised maintenance model rather than as the only detector.